Gazebo Ros. Roboticists all around the world are leveraging Gazebo and ROS in applications ranging from. This course contains all the concepts you need for simulating.

Instructions for using Gazebo with ArduPilot are here and an old version has been blogged about here.
However, is there any way I can either. build gazebo_ros_control from the source code and install in my local jade.

Company Spotlight: HumaRobotics — ROS-Industrial

Four-Wheeled Robot with ROS and Gazebo for SLAM and ...

ROS/Gazebo Simulation - YouTube

Ouster OS-1 ROS Gazebo Simulation in MCity and Citysim

Mutliple vehicles in PX4 STIL on gazebo - YouTube

waiter_bot ros gazebo crash test 2014-10-30 - YouTube
ROS_Short_Course_Fall_2017 – Dynamical Systems and Control ...

Figure 1 from 3D Mapping Hexacopter Simulation using ...

Object detection using 3D Velodyne LiDAR with ROS, Gazebo ...
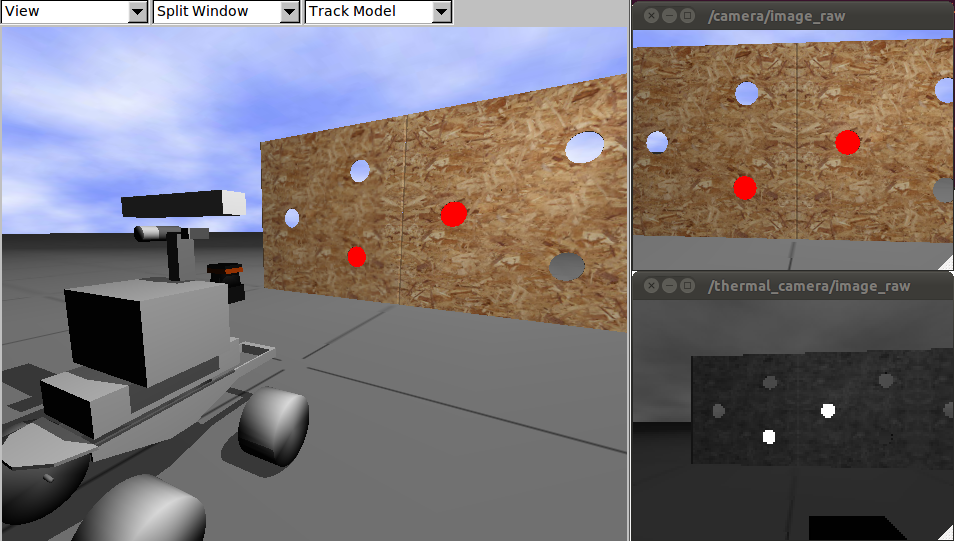
hector_gazebo_thermal_camera - ROS Wiki

ROS architecture with robots, sensors, controllers and the ...

Gazebo Simulation · PX4 v1.8.2 Developer Guide

ROS Gazebo MAV Demo Simulation(AscTec Firefly) - YouTube

Turtlebot finding exit using ROS+Gazebo+Matlab, AMR HW4c ...

[ROS Q&A] 117 - How to Launch a ROS Industrial Robots ...
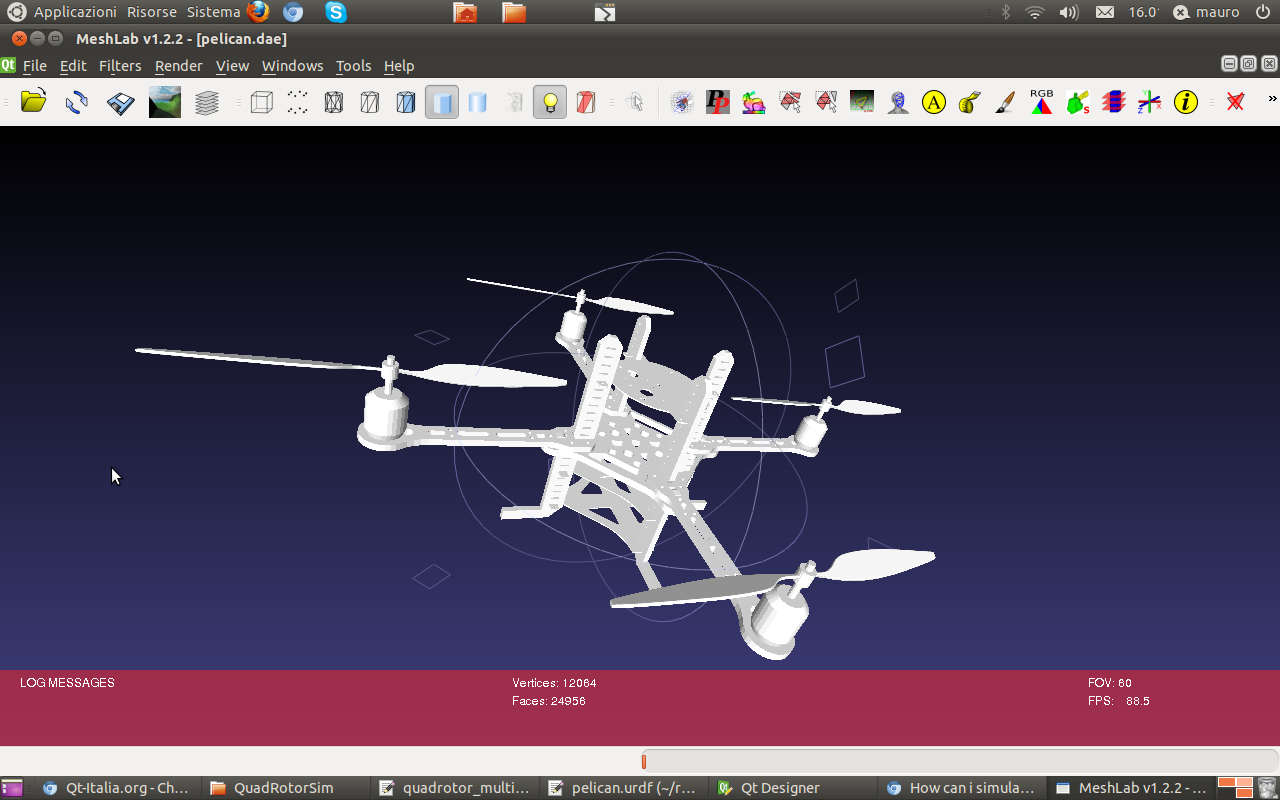
How can i simulate an UAV on Gazebo? - ROS Answers: Open ...

Robotic simulation scenarios with Gazebo and ROS
All about Gazebo ROS (Gazebo 9) | The Construct
Gazebo integrated the ODE physics engine, OpenGL rendering, and support code for sensor simulation and actuator control. Historically using Gazebo with ROS required a specific. As of C Turtle release, Gazebo provides a set of ROS API's that allows users to modify and get information about various aspects of the simulated world. Most importantly, the difference between gazebo and ROS is slightly blurred, raising a few questions Most of the wheeled robots in ROS use move_base to move the robot. move_base geometry model is based on I was looking for a car robot model with such geometry so I can test it in gazebo and ROS. This course contains all the concepts you need for simulating. This plugin is useful in learning about moving robot. gazebo_ros_control missing in latest ros-jade-gazebo-ros-pkgs. ROS - Robot-independent Gazebo plugins for sensors, motors and dynamic reconfigurable components.


0 comments:
Post a Comment